
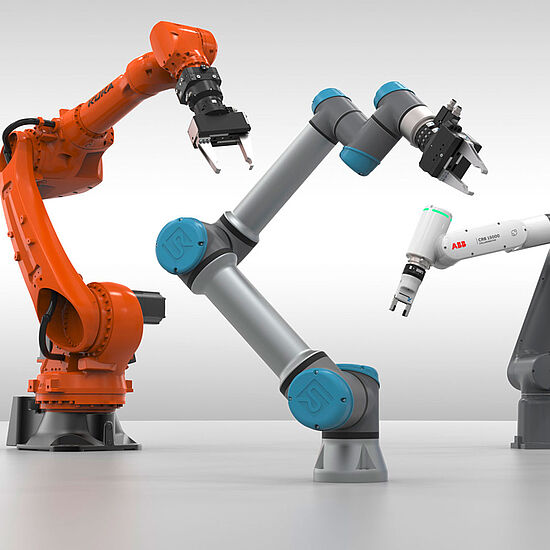
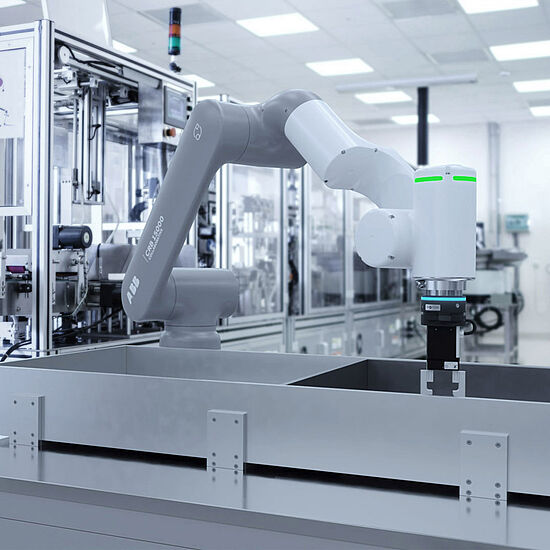
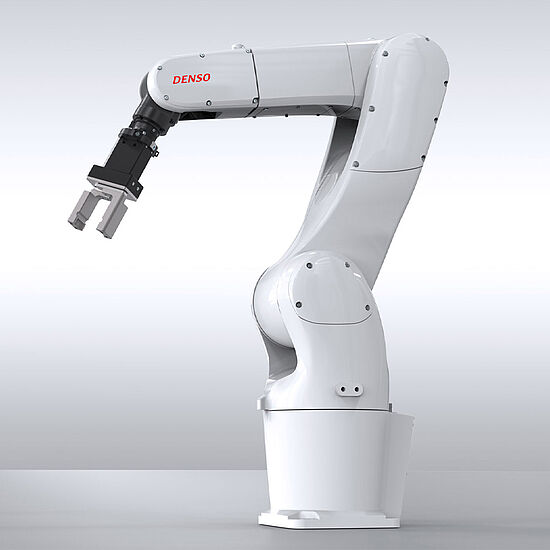
Robotertechnik
Unser Portfolio umfasst ein breites Spektrum an Robotertechnik von Werkzeugwechsler über Kollisionsschutz bis hin zu Achsausgleich für die Industrie- und Leichtbaurobotik.








Komponenten der Robotertechnik







2-Backen-Parallelgreifer mit großem Hub
Serie GEH6000IL



Werkzeugwechsler
Serie FWR

- Automatisierter Werkzeugwechsel ohne externe Ansteuerung
- Manueller Werkzeugwechsel
- Optionale Medienübertragung
2-Backen-Parallelgreifer mit großem Hub
Serie LWR
- DGUV zertifizierte kollaborative Greifer
- Servoantrieb mit integriertem Controller
- Sensitive Ausführung
- IO-Link-Ansteuerung
- Verwendung in Kombination mit LWR Festteilen (IO-Link/RS485)
- Optimal für Anwendungen von größeren Werkstücken sowie unterschiedlichen Abmessungen durch Servo-Technologie
1. Werkzeugwechsler

- Automatisierter Werkzeugwechsel ohne externe Ansteuerung
- Manueller Werkzeugwechsel
- Optionale Medienübertragung
2. LWR-HRC-02
- DGUV zertifizierte kollaborative Greifer
- Servoantrieb mit integriertem Controller
- Sensitive Ausführung
- IO-Link-Ansteuerung
- Verwendung in Kombination mit LWR Festteilen (IO-Link/RS485)
- Optimal für Anwendungen von größeren Werkstücken sowie unterschiedlichen Abmessungen durch Servo-Technologie
2-Backen-Parallelgreifer
Serie GEP2000

- Für geringe bis hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 40 ... TK 160
- mit 4 ... 10 pneumatischen Durchführungen
- Energieelemente zur Übertragung weiterer Medien optional erhältlich

2.
- Für geringe bis hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 40 ... TK 160
- mit 4 ... 10 pneumatischen Durchführungen
- Energieelemente zur Übertragung weiterer Medien optional erhältlich

2-Backen-Parallelgreifer
Serie GEP2000
2-Backen-Parallelgreifer
Serie LWR
- DGUV zertifizierte kollaborative Greifer
- Größter Hub bei kleinem Bauraum
- Einfachste Ansteuerung
- Positionierbarkeit über IO-Link
- Verwendung in Kombination mit Match - Robotermodulen (Digital I/O/IO-Link/RS485)
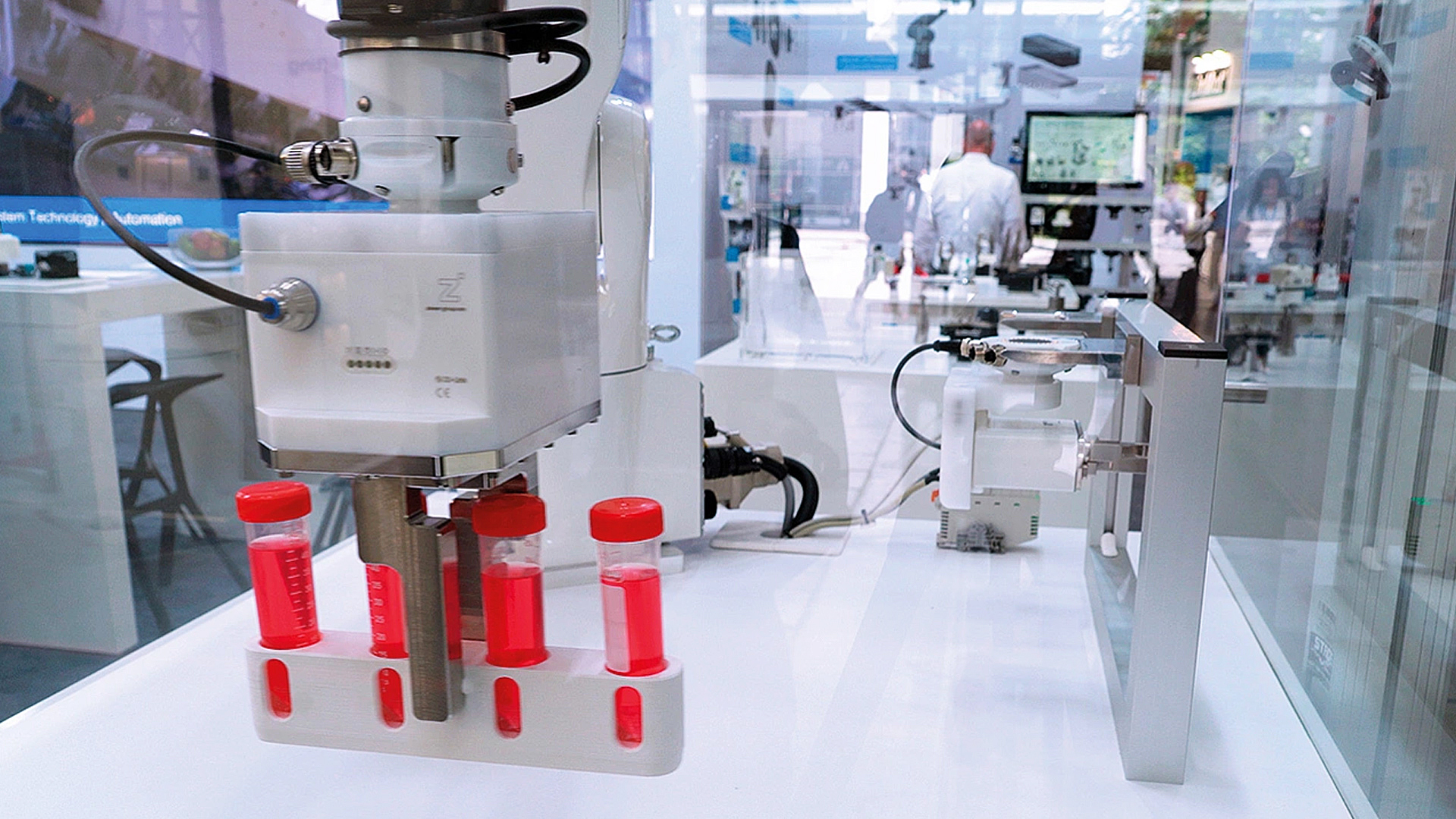
- Optimal für Anwendungen wie z.B. Medizintechnik/Laborautomation, Montage, Elektronikindustrie u.v.m.
2. LWR
- DGUV zertifizierte kollaborative Greifer
- Größter Hub bei kleinem Bauraum
- Einfachste Ansteuerung
- Positionierbarkeit über IO-Link
- Verwendung in Kombination mit Match - Robotermodulen (Digital I/O/IO-Link/RS485)
- Optimal für Anwendungen wie z.B. Medizintechnik/Laborautomation, Montage, Elektronikindustrie u.v.m.
2-Backen-Parallelgreifer
Serie GPP5000

- Steel Linear Guide – Das überlegene Führungskonzept
- Dicht und korrosionsgeschützt – Der Universalgreifer
- Aluminum Linear Guide – Die Alternative
Flachschwenkeinheiten
Serie SF-C

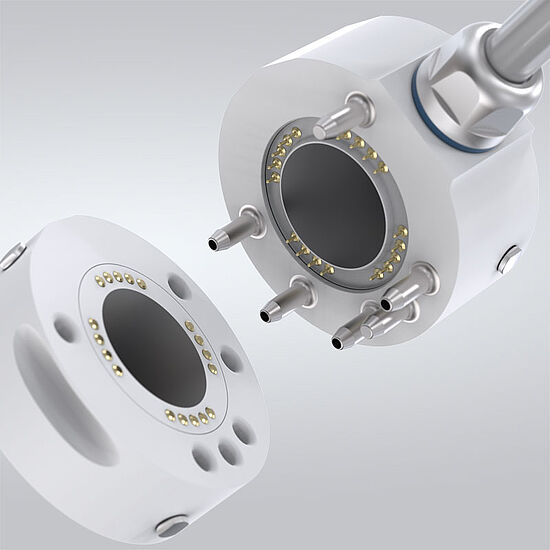
Drehverteiler
Serie DVR

- Für geringe bis hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK40... TK160
- Mit 4...8 pneumatischen Durchführungen
- Mit 4...12 elektrischen Durchführungen
1. 2-Backen-Parallelgreifer

- Steel Linear Guide – Das überlegene Führungskonzept
- Dicht und korrosionsgeschützt – Der Universalgreifer
- Aluminum Linear Guide – Die Alternative

3. Drehverteiler

- Für geringe bis hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK40... TK160
- Mit 4...8 pneumatischen Durchführungen
- Mit 4...12 elektrischen Durchführungen

2-Backen-Parallelgreifer
Serie LWR
- DGUV zertifizierte kollaborative Greifer
- Größter Hub bei kleinem Bauraum
- Einfachste Ansteuerung
- Positionierbarkeit über IO-Link
- Verwendung in Kombination mit Match - Robotermodulen (Digital I/O/IO-Link/RS485)
- Optimal für Anwendungen wie z.B. Medizintechnik/Laborautomation, Montage, Elektronikindustrie u.v.m.
1. LWR
- DGUV zertifizierte kollaborative Greifer
- Größter Hub bei kleinem Bauraum
- Einfachste Ansteuerung
- Positionierbarkeit über IO-Link
- Verwendung in Kombination mit Match - Robotermodulen (Digital I/O/IO-Link/RS485)
- Optimal für Anwendungen wie z.B. Medizintechnik/Laborautomation, Montage, Elektronikindustrie u.v.m.

2-Backen-Parallelgreifer
Serie LWR
- DGUV zertifizierte kollaborative Greifer
- Größter Hub bei kleinem Bauraum
- Einfachste Ansteuerung
- Positionierbarkeit über IO-Link
- Verwendung in Kombination mit Match - Robotermodulen (Digital I/O/IO-Link/RS485)
- Optimal für Anwendungen wie z.B. Medizintechnik/Laborautomation, Montage, Elektronikindustrie u.v.m.
1. LWR
- DGUV zertifizierte kollaborative Greifer
- Größter Hub bei kleinem Bauraum
- Einfachste Ansteuerung
- Positionierbarkeit über IO-Link
- Verwendung in Kombination mit Match - Robotermodulen (Digital I/O/IO-Link/RS485)
- Optimal für Anwendungen wie z.B. Medizintechnik/Laborautomation, Montage, Elektronikindustrie u.v.m.
- DGUV zertifizierte kollaborative Greifer
- Größter Hub bei kleinem Bauraum
- Einfachste Ansteuerung
- Positionierbarkeit über IO-Link
- Verwendung in Kombination mit Match - Robotermodulen (Digital I/O/IO-Link/RS485)
- Optimal für Anwendungen wie z.B. Medizintechnik/Laborautomation, Montage, Elektronikindustrie u.v.m.
1.
- DGUV zertifizierte kollaborative Greifer
- Größter Hub bei kleinem Bauraum
- Einfachste Ansteuerung
- Positionierbarkeit über IO-Link
- Verwendung in Kombination mit Match - Robotermodulen (Digital I/O/IO-Link/RS485)
- Optimal für Anwendungen wie z.B. Medizintechnik/Laborautomation, Montage, Elektronikindustrie u.v.m.
- Für geringe bis hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 40 ... TK 160
- mit 4 ... 10 pneumatischen Durchführungen
- Energieelemente zur Übertragung weiterer Medien optional erhältlich
1.
- Für geringe bis hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 40 ... TK 160
- mit 4 ... 10 pneumatischen Durchführungen
- Energieelemente zur Übertragung weiterer Medien optional erhältlich

- Für geringe bis hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 40 ... TK 160
- mit 4 ... 10 pneumatischen Durchführungen
- Energieelemente zur Übertragung weiterer Medien optional erhältlich
1.
- Für geringe bis hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 40 ... TK 160
- mit 4 ... 10 pneumatischen Durchführungen
- Energieelemente zur Übertragung weiterer Medien optional erhältlich

Kataloge, Broschüren und Flyer

Katalog
Handhabungstechnik 2 / Roboterzubehör
19 MB,
PDF
Herunterladen
19 MB,
PDF
Herunterladen
19 MB,
PDF
Herunterladen
19 MB,
PDF
Herunterladen
19 MB,
PDF
Herunterladen
19 MB,
PDF
Herunterladen
18 MB,
PDF
Herunterladen
19 MB,
PDF
Herunterladen
18 MB,
PDF
Herunterladen
