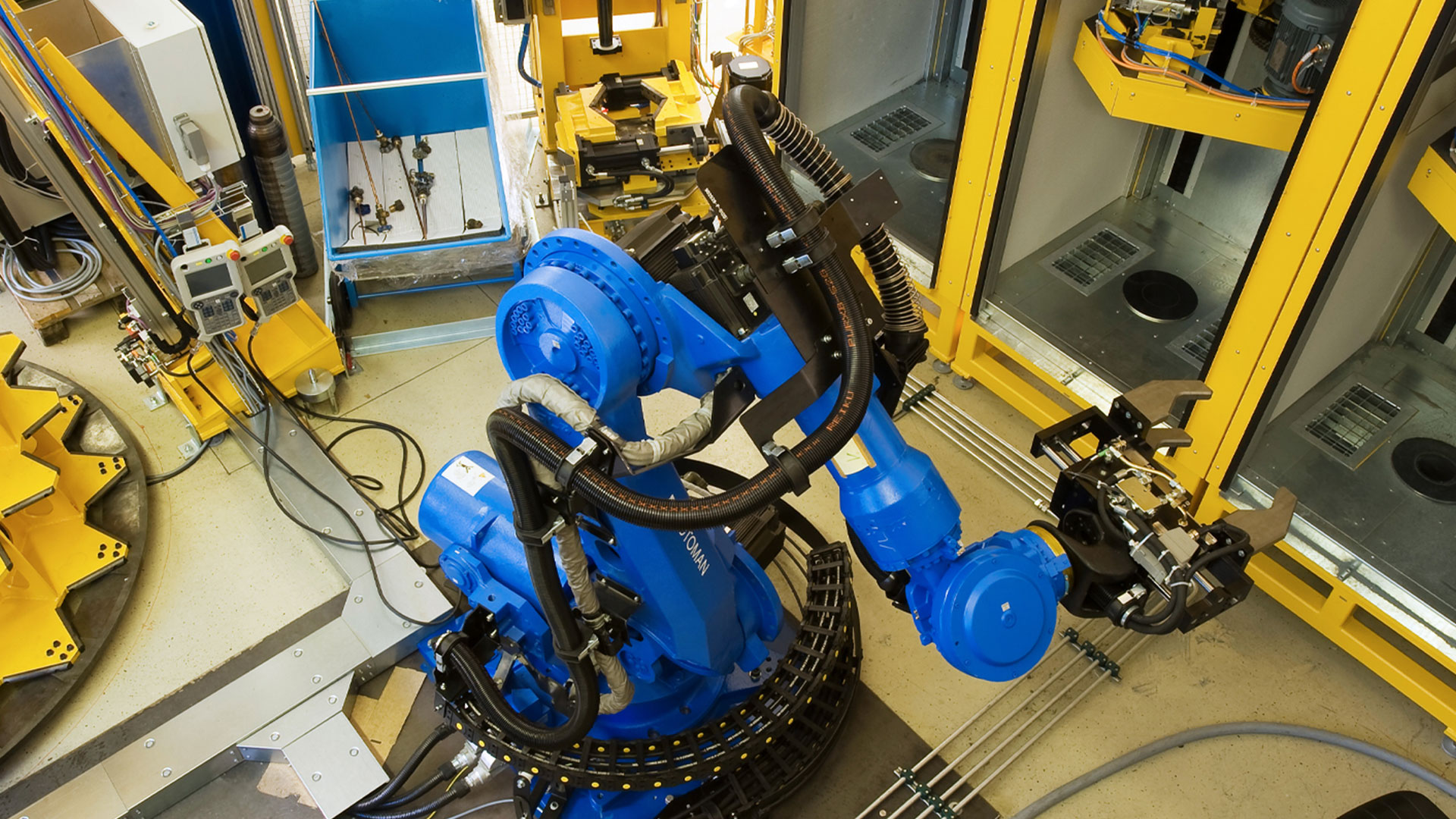
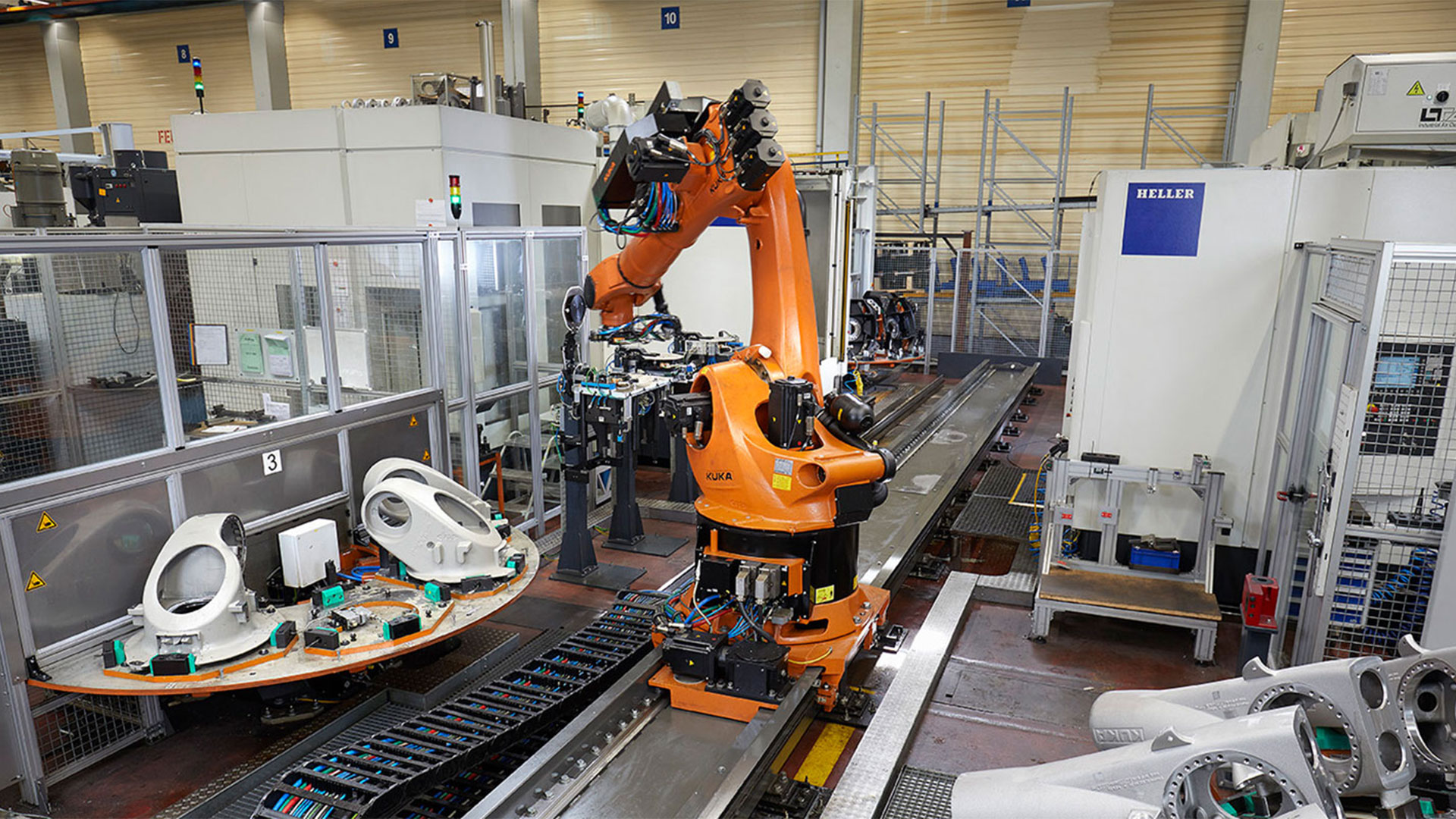
Konventionelle Industrieroboter
Mit dem Bereich der konventionellen Industrieroboter hat die Erfolgsgeschichte der roboterbasierten Automatisierung in den frühen 60er Jahren des letzten Jahrhunderts begonnen. Seitdem hat sich die Technologie rasant weiterentwickelt. Roboter wurden zuverlässiger, flexibler und einfacher in der Installation, Programmierung und Wartung. Die Zimmer Group hat 1980 den weltweit ersten Seriengreifer auf den Markt gebracht und seitdem die Standards im Bereich End-of-Arm-Tools (EOAT) entscheidend geprägt.
Sie benötigen Beratung oder haben Fragen zu einer konkreten Roboter-Anwendung? Dann freuen wir uns auf Ihre Anfrage!
Ihre Benefits:
- Schnelle und einfache Integration in bestehende Anlagen
- Maximale Performance bei höchster Sicherheit
- Systemlandschaft für gesamte Wertschöpfungskette
- IP-Schutzklasse für alle Umgebungsbedingungen
- Energieeffizient in der Herstellung und Anwendung
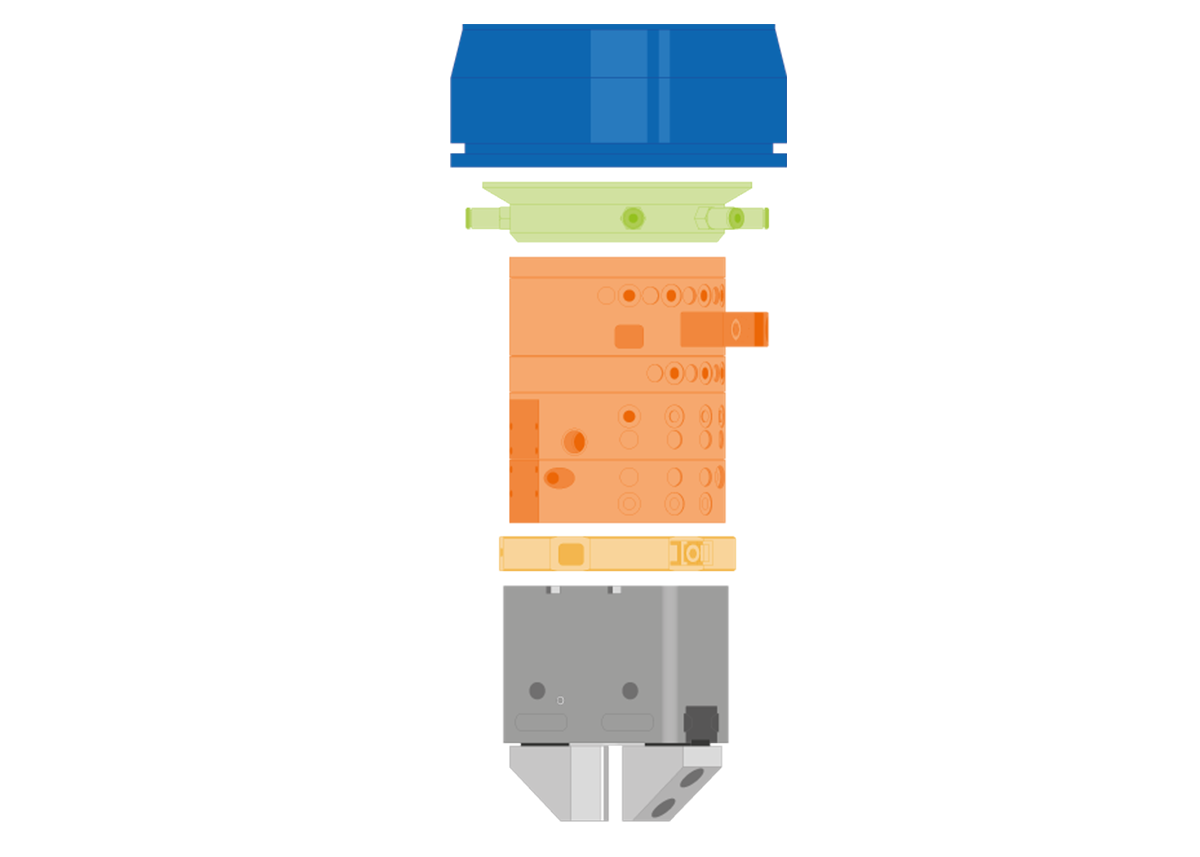
KONFIGURATIONSEBENEN am Roboterarm
 mehr
mehr mehr
mehr

KOMPONENTEN Für Industrieroboter
Über 3.000 standardisierte Greifer, Schwenkeinheiten, Robotertechnik und vieles mehr. Wir sind Vollsortimenter technologisch hochwertiger und führender Produkte mit hoher Lieferperformance.
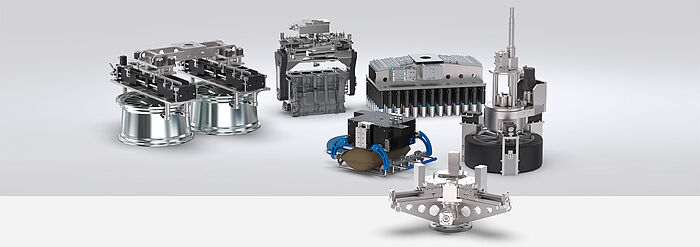
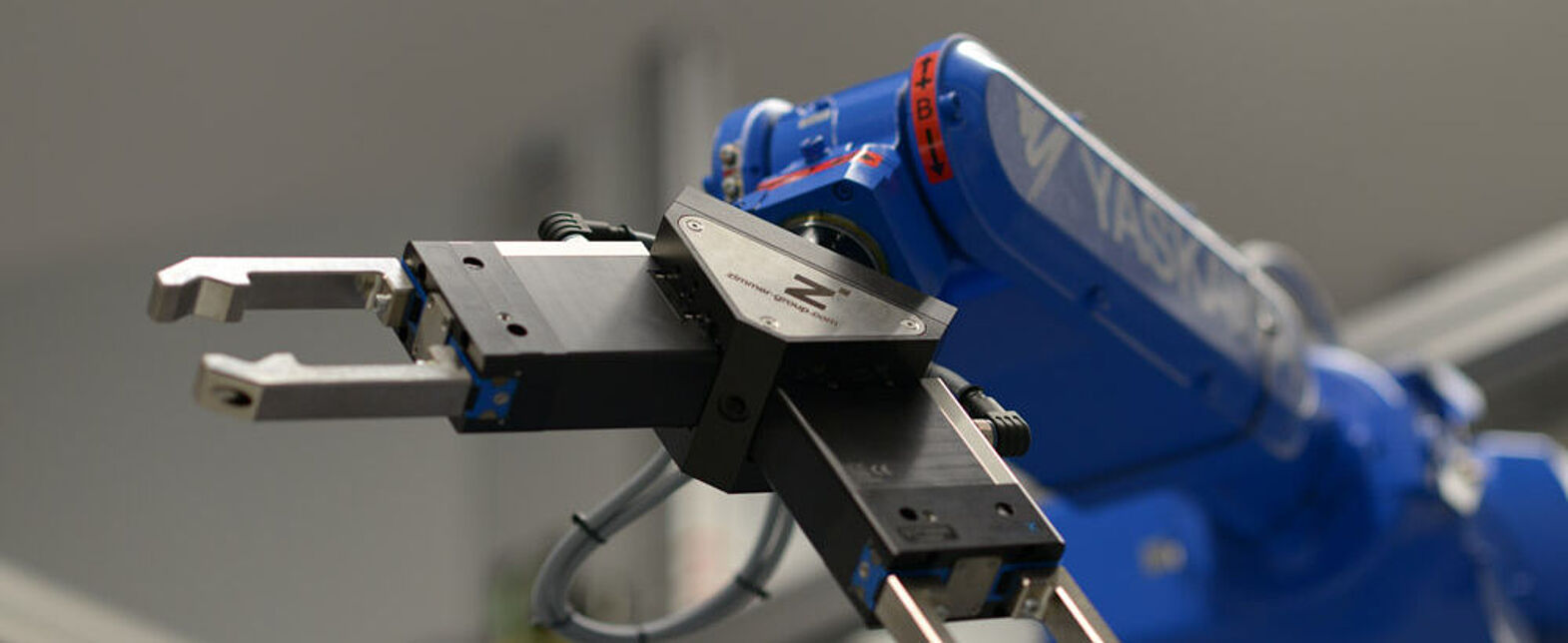
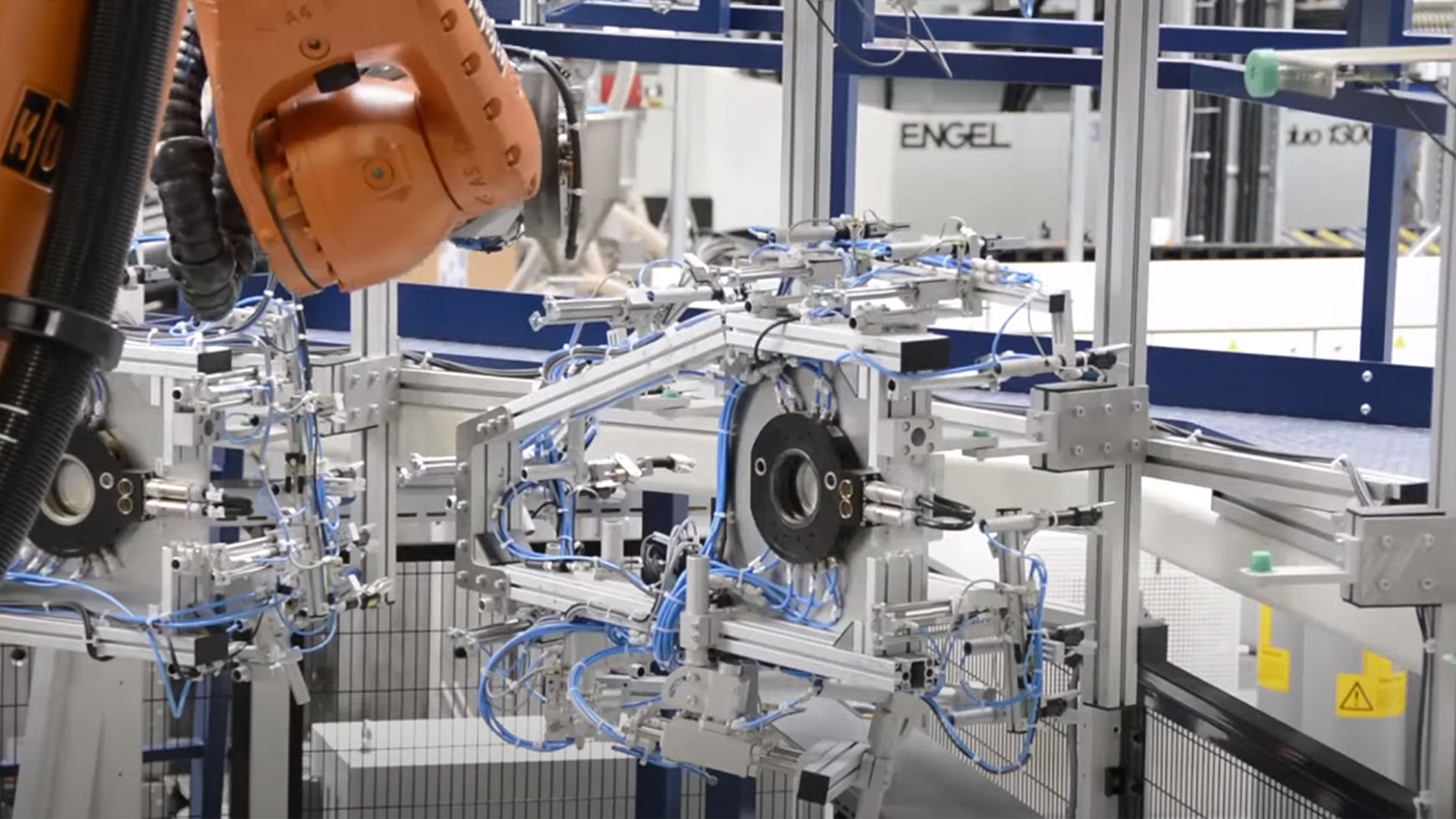
END-OF-ARM-TOOLS
Die Zimmer Group bietet seit über 30 Jahren End-of-Arm-Tooling-Systeme an, z.B. für die Montage von Antriebssträngen, die Beschickung von Fertigungslinien in der Automobilindustrie oder die Bearbeitung von Korpusteilen in der Möbelindustrie.
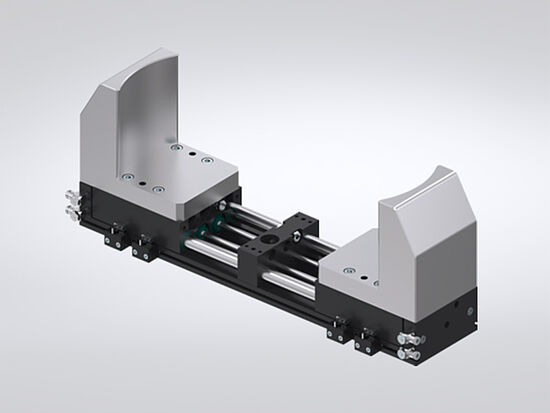
2-Backen-Parallelgreifer mit großem Hub
Serie GH7000

- Schwerlast Linearführung für den Einsatz unter extremen Bedingungen
- Ideal für höchste Querkräfte und Momentenaufnahme

- Schwerlast Linearführung für den Einsatz unter extremen Bedingungen
- Ideal für höchste Querkräfte und Momentenaufnahme
Werkzeugwechsler
Serie WWR1000

- Für sehr hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 160 ... TK 200
- Energieelemente zur Übertragung von Medien optional erhältlich
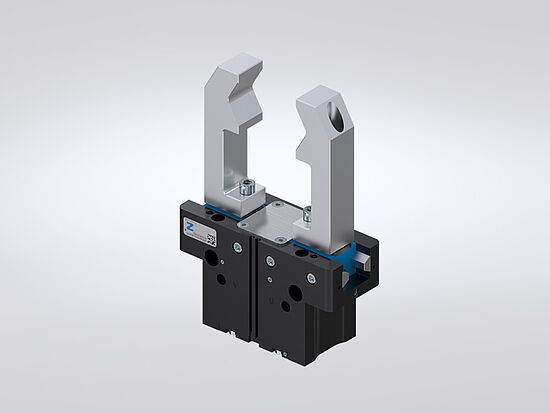
2-Backen-Parallelgreifer
Serie GP400


- Für sehr hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 160 ... TK 200
- Energieelemente zur Übertragung von Medien optional erhältlich

- Für geringe bis hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 40 ... TK 160
- mit 4 ... 10 pneumatischen Durchführungen
- Energieelemente zur Übertragung weiterer Medien optional erhältlich
- Für geringe bis hohe Traglasten geeignet
- Anschlussflansch nach EN ISO 9409-1: TK 40 ... TK 160
- mit 4 ... 10 pneumatischen Durchführungen
- Energieelemente zur Übertragung weiterer Medien optional erhältlich

2-Backen-Parallelgreifer
Serie GP400
Palettenwechsler
Serie SPP

- Höchste Einzugs- und Haltekraft
- Schlanke Bauweise für maximale Ausnutzung des Maschinenraums
- Abfrage des Spannzustandes und der Palettenanwesenheit
- Sicheres Handling durch Reinigungsfunktion und Federspeicher

- Höchste Einzugs- und Haltekraft
- Schlanke Bauweise für maximale Ausnutzung des Maschinenraums
- Abfrage des Spannzustandes und der Palettenanwesenheit
- Sicheres Handling durch Reinigungsfunktion und Federspeicher