Lekkie roboty dla zoptymalizowanych procesów
Odkryj przyszłość automatyzacji dzięki naszym najnowocześniejszym komponentom do lekkiej robotyki. Nasze innowacyjne rozwiązania oferują maksymalną elastyczność i precyzję, dzięki czemu procesy produkcyjne są bardziej wydajne i opłacalne. Chwytaki, czujniki i oprzyrządowanie End-of-Arm – mamy odpowiednie komponenty do indywidualnych wymagań. Dzięki naszemu doświadczeniu pomagamy sprostać wyzwaniom związanym z automatyzacją i zwiększyć produktywność.
Rozpocznij nową erę lekkiej robotyki już teraz i porozmawiaj z naszymi ekspertami – skontaktuj się z nami już dziś!
Twoje korzyści:
- Prosta integracja dostosowana do robota
- Maksymalna wydajność przy maksymalnym bezpieczeństwie
- Środowisko systemowe dla całego łańcucha wartości
- Stopień ochrony IP do trudnych warunków otoczenia
- Efektywność energetyczna w produkcji i aplikacji

Dlaczego lekkie roboty?
Coraz szybsze tempo rozwoju technologicznego, rosnąca liczba różnych przedmiotów obrabianych i, co nie mniej ważne, coraz większa penetracja rynku przez roboty doprowadziły do trendu w kierunku lekkich robotów. Uproszczona obsługa tych robotów otworzyła nowe sektory i obszary biznesowe. Ze względu na szybką instalację i uruchomienie lekkie roboty są również idealne dla początkujących robotyków. Zarówno proste, jak i stosunkowo złożone aplikacje mogą być realizowane w połączeniu z odpowiednim efektorem końcowym.
CZŁOWIEK – ROBOT
RÓŻNE FORMY INTERAKCJI
Współpraca między człowiekiem i robotem wiąże się z wyzwaniami w zakresie bezpieczeństwa, ale także z obawami ze strony pracowników. Tutaj przedstawiamy przegląd różnych form interakcji z (lekkimi) robotami. Zastosowanie robotyki ma ogromny potencjał dla firm pod względem efektywności, oszczędności kosztów i zmniejszenia obciążenia pracowników.
KOMPONENTY KONWENCJONALNE
Wyraźnie wyznaczone obszary robocze dla robotów są odpowiednie do ciężkich prac lub czynności potencjalnie niebezpiecznych dla pracownika. Efektory końcowe nie wymagają specjalnych geometrii HRC ani ograniczeń siły chwytania, ponieważ kontakt z pracownikiem jest wykluczony przez ograniczenia przestrzenne.
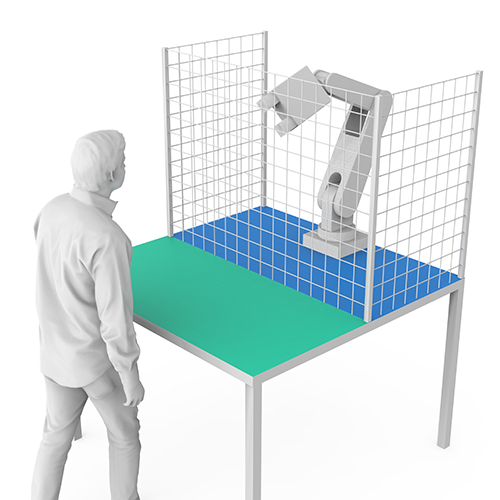
Komórka automatyzacyjna
- Oddzielne przestrzenie pracy
- Uchwyt obrabianego przedmiotu w zabezpieczonym obszarze
- Możliwość zastosowania wszystkich systemów chwytających
- Praca niepowiązana
- Brak konieczności dotykania
- Maksymalna prędkość
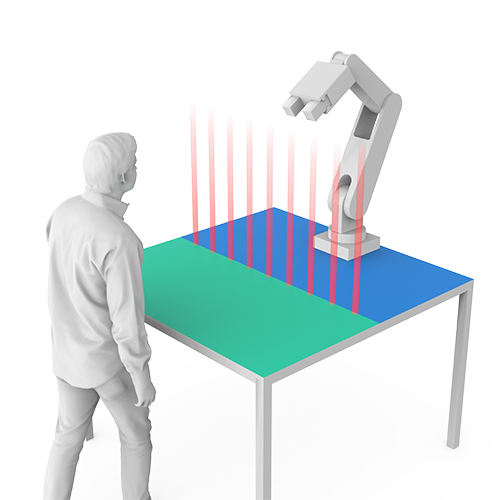
Koegzystencja
- Rozpoznawanie obecności
- Uchwyt obrabianego przedmiotu w zabezpieczonym obszarze
- Możliwość zastosowania wszystkich systemów chwytających
- Oddzielne przestrzenie pracy
- Praca niepowiązana
- Brak konieczności dotykania
- Mniejsza prędkość
KOMPONENTY HRC
Pojawienie się technologii robotów w prawie wszystkich obszarach produkcji na całym świecie oraz postęp techniczny w dziedzinie technologii czujników i przetwarzania obrazu otworzyły pole dla robotów kooperujących i współpracujących w celu wspierania ludzi (HRC) w procesie produkcyjnym. Kooperacja/współpraca otwiera przed człowiekiem nowe obszary zadań i ich precyzyjne, elastyczne i efektywne wykonywanie.
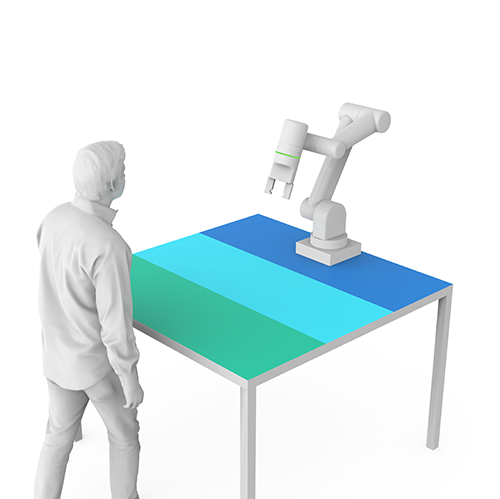
KOOPERACJA
- Strefy ingerencji
- Uchwyt obrabianego przedmiotu w zabezpieczonym obszarze
- Chwytaki o specjalnej geometrii HRC
- Bezpieczne utrzymanie detalu także przy zaniku zasilania
- Wspólna przestrzeń pracy
- Praca powiązana
- Brak konieczności dotykania
- Mniejsza prędkość
Współpraca
- Wspólna przestrzeń pracy
- Uchwyt obrabianego przedmiotu w niezabezpieczonym obszarze
- Chwytaki o specjalnej geometrii HRC oraz bezpieczne ograniczenie siły chwytania
- Siła chwytania ograniczona do maks. 140 N zgodnie z normą ISO / TS 15066
- Bezpieczne utrzymanie detalu także przy zaniku zasilania
- Praca powiązana
- Konieczne dotknięcie
- Mniejsza prędkość
Najważniejsza technologia: STANDARDINTERFACE
Do robotów i efektorów końcowych
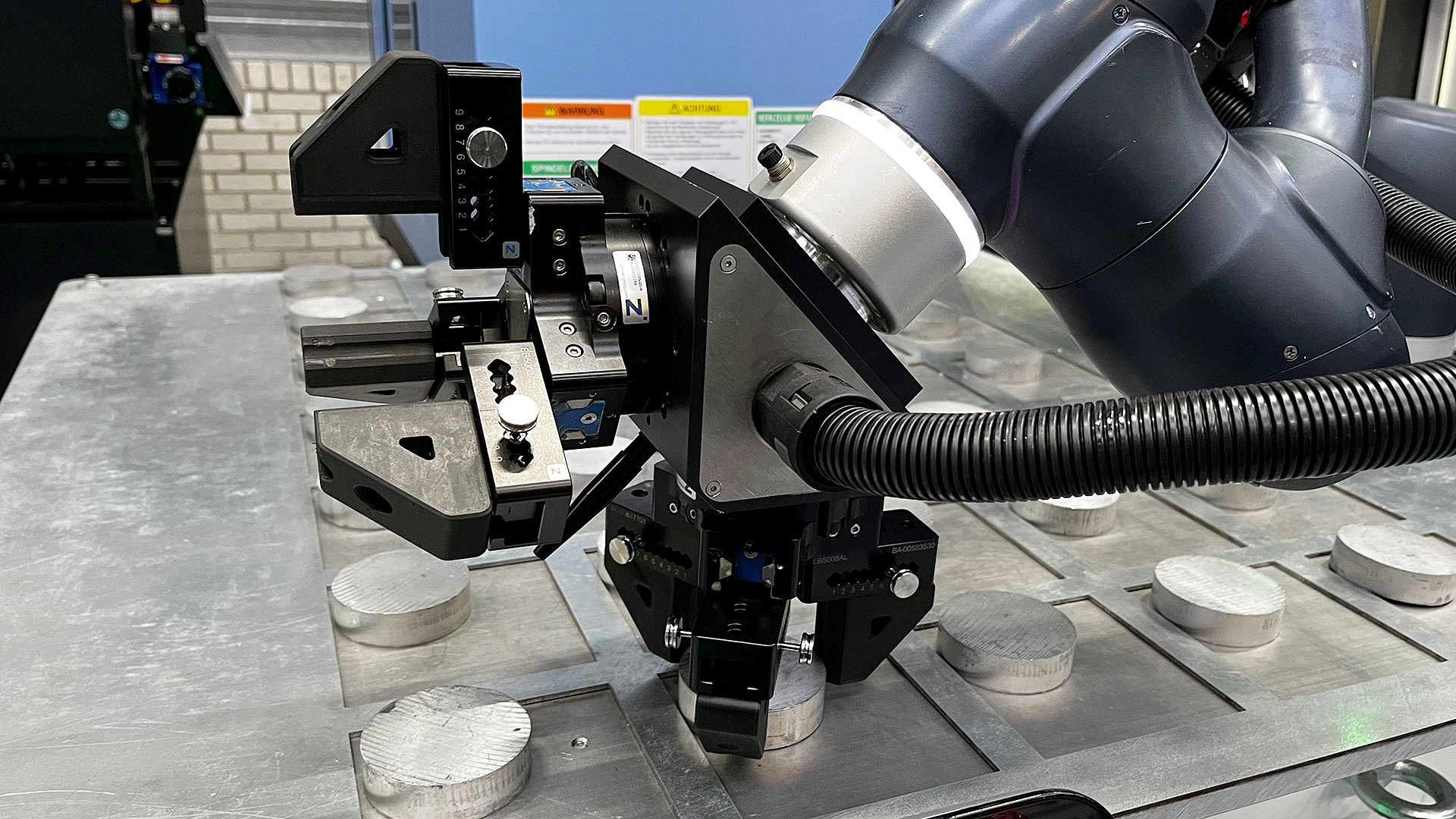
Ekosystem End-of-Arm MATCH
Dzięki szerokiemu zakresowi funkcji oraz uniwersalnym interfejsom komunikacyjnym MATCH jest kompatybilny z każdym dostępnym na rynku robotem lekkim – to idealny system dla cobotów i konwencjonalnych robotów 6-osiowych.
Komponenty MATCH można rozpoznać po tym symbolu.
Produkt roku 2023
System End-of-Arm MATCH jest kamieniem milowym w robotyce i został wyróżniony przez WEKA Business Medien GmbH jako „Produkt Roku 2023”. W kategorii „Manipulacja, montaż i logistyka produkcji” Zimmer Group pokonała 11 konkurentów i zajęła pierwsze miejsce.
Tak różnorodne jak system – zastosowania
Czy to robotyka mobilna i współpracująca, czy też w pełni zautomatyzowane aplikacje: jeden elastyczny system zapewnia niemal nieograniczone spektrum zastosowań od produkcji i montażu, przez logistykę magazynową aż po wysyłkę lub automatyzację laboratoriów.
Typowe zadania obejmują pick & place, kompletację zamówień, pakowanie i paletyzację, kontrole i testowanie. Dostępne są różne chwytaki mechaniczne i próżniowe, dostosowane do detali i konkretnego zadania manipulacji. Jeśli wymagania ulegną zmianie, system można szybko i łatwo dostosować.

Standaryzacja interfejsu robota
Jeden moduł robota – cała gama kompatybilnych efektorów końcowych. Do cobotów, lekkich robotów i robotów konwencjonalnych.

Prosta instalacja – Plug&Work
Uproszczona komunikacja z maszyną dzięki niezbędnym parametrom komunikacji.

Elastyczność
Bezpośrednie sterowanie i monitorowanie funkcji robota za pomocą oprogramowania.

Złożone zastosowania robotyczne
Różne prace przy jednym przedmiocie dzięki automatycznej wymianie efektorów końcowych.

Chwytaki trójszczękowe koncentryczne
Seria GPD5000

- Steel Linear Guide — przemyślana koncepcja prowadnicy
- Szczelny i odporny na korozję — uniwersalny chwytak
- Aluminum Linear Guide — alternatywny wybór
Kołnierz kątowy
Seria WFR


- Steel Linear Guide — przemyślana koncepcja prowadnicy
- Szczelny i odporny na korozję — uniwersalny chwytak
- Aluminum Linear Guide — alternatywny wybór