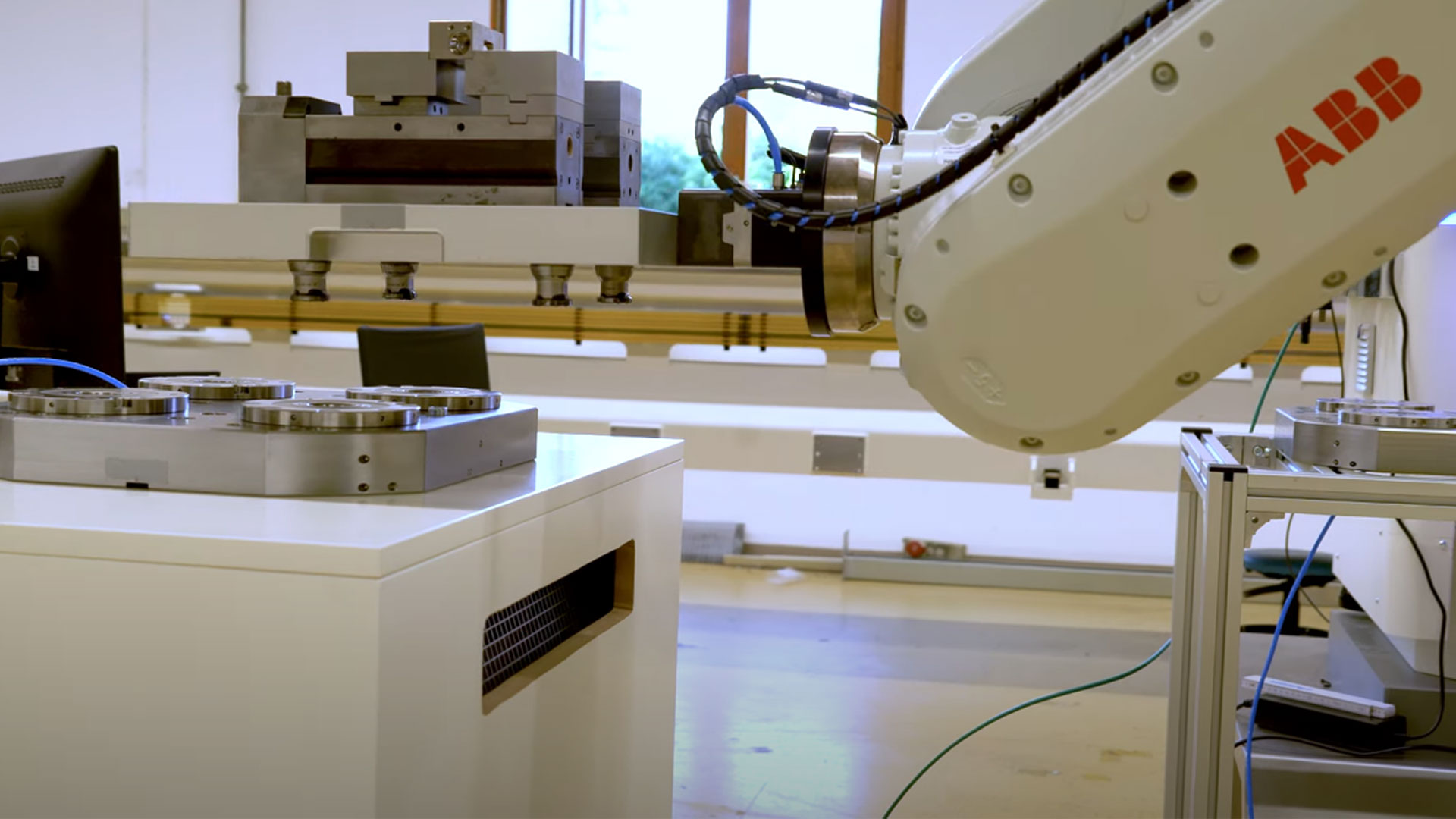
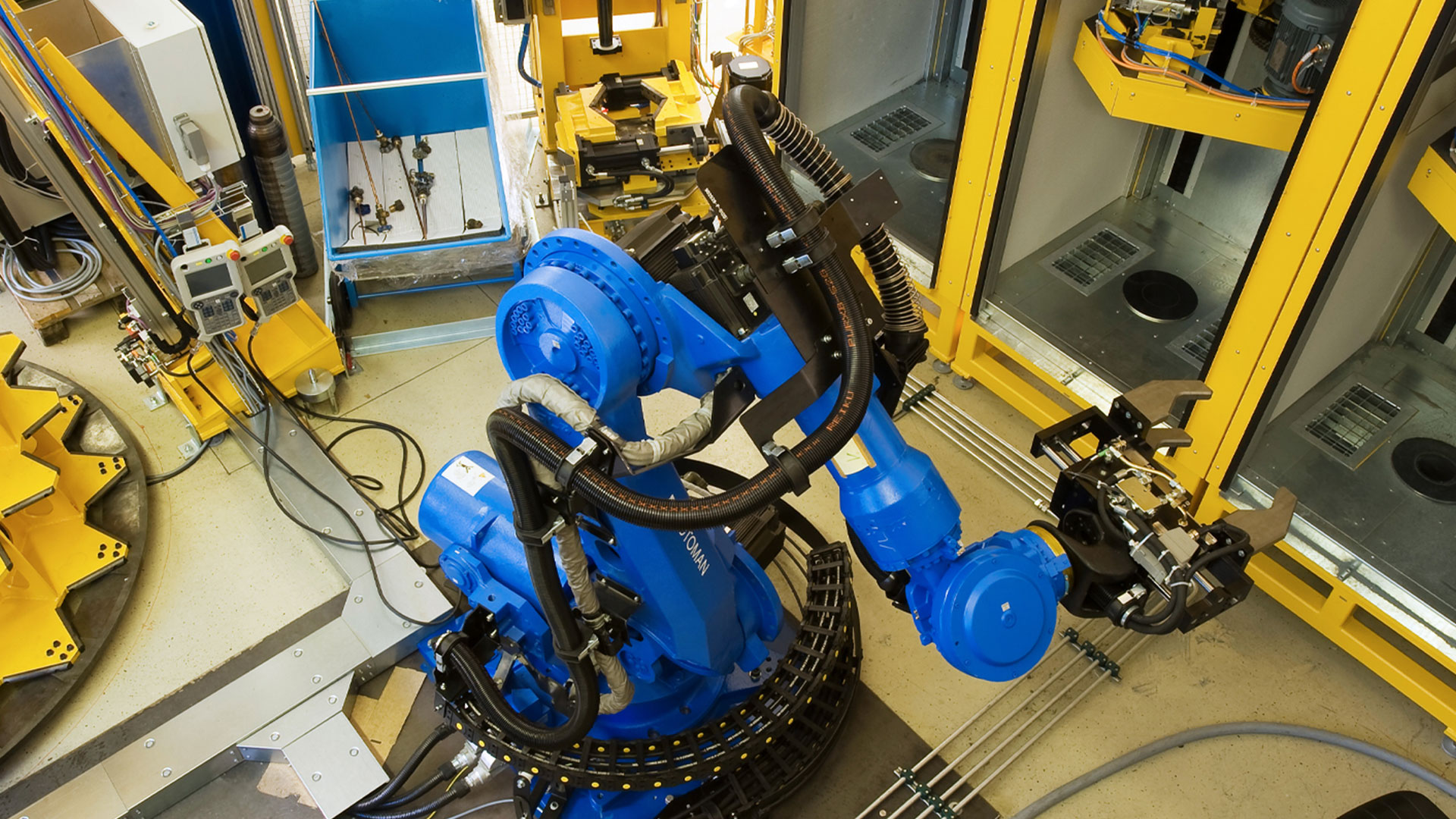
Robots industriels traditionnels
La success story de l’automatisation robotisée a commencé avec l’apparition des robots industriels traditionnels au début des années 60. Depuis lors, la technologie s’est développée rapidement. Les robots sont devenus plus fiables, plus flexibles et plus faciles à installer, à programmer et à entretenir. En 1980, Zimmer Group a lancé la première série de pinces au monde et a, depuis lors, défini de manière déterminante les normes dans le domaine des outils end-of-arm (EOAT).
Vous avez besoin de conseils ou vous avez des questions sur une application robotisée concrète ? Alors, n’hésitez pas à nous contacter !
Vos avantages :
- Une intégration rapide et simple dans les installations existantes
- Une performance maximale pour une sécurité maximale
- Un environnement système pour toute la chaîne de valeur
- Une classe de protection IP pour toutes les conditions ambiantes
- Efficacité énergétique dans la fabrication et l’utilisation
NIVEAUX DE CONFIGURATION sur le bras robotisé
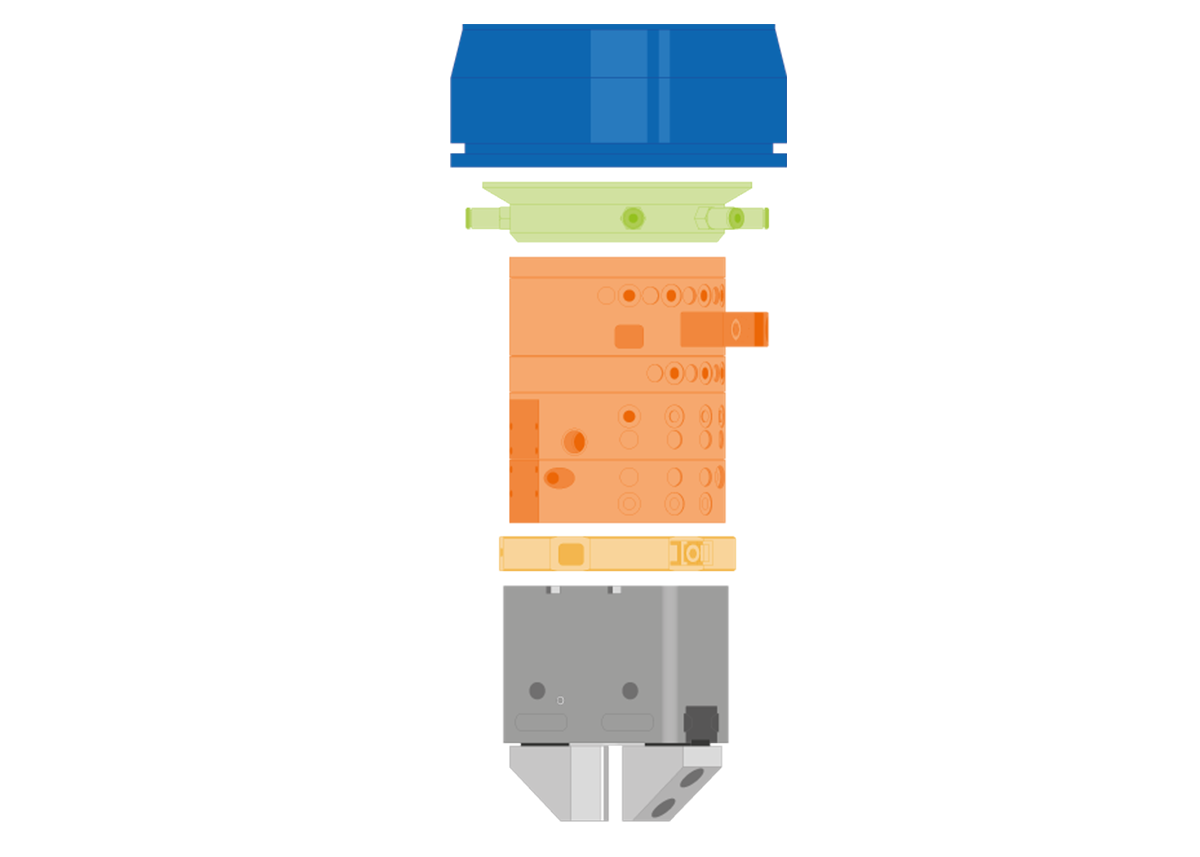
 plus
plus plus
plus

COMPOSANTS pour les robots industriels
Plus de 3 000 pinces standardisées, unités de rotation, robotique et bien plus encore. Nous proposons une gamme complète de produits technologiques haut de gamme et compétitifs ainsi qu’un service de livraison performant.
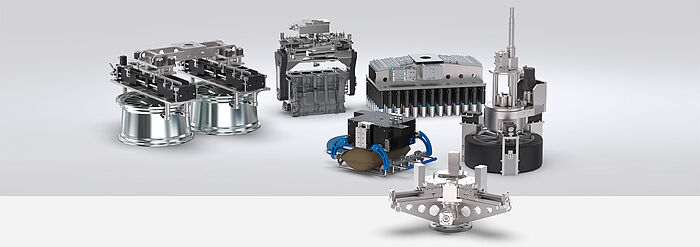
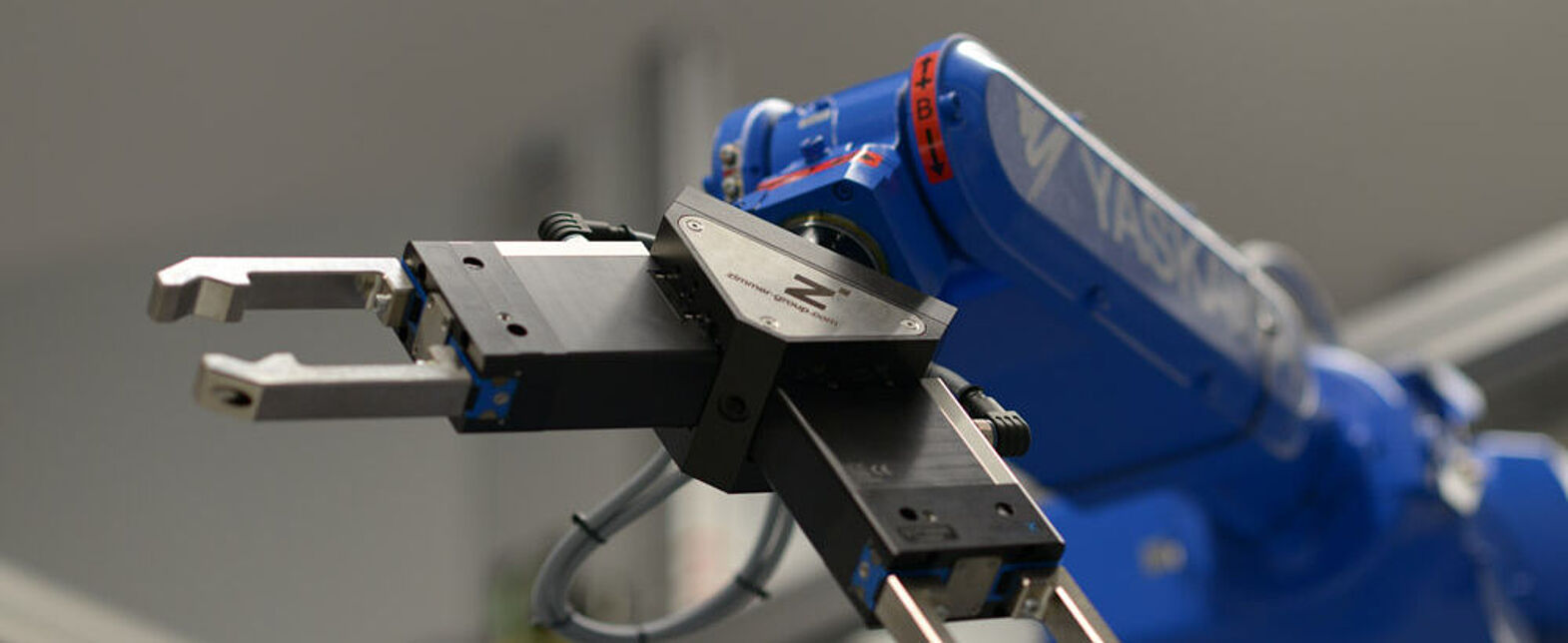
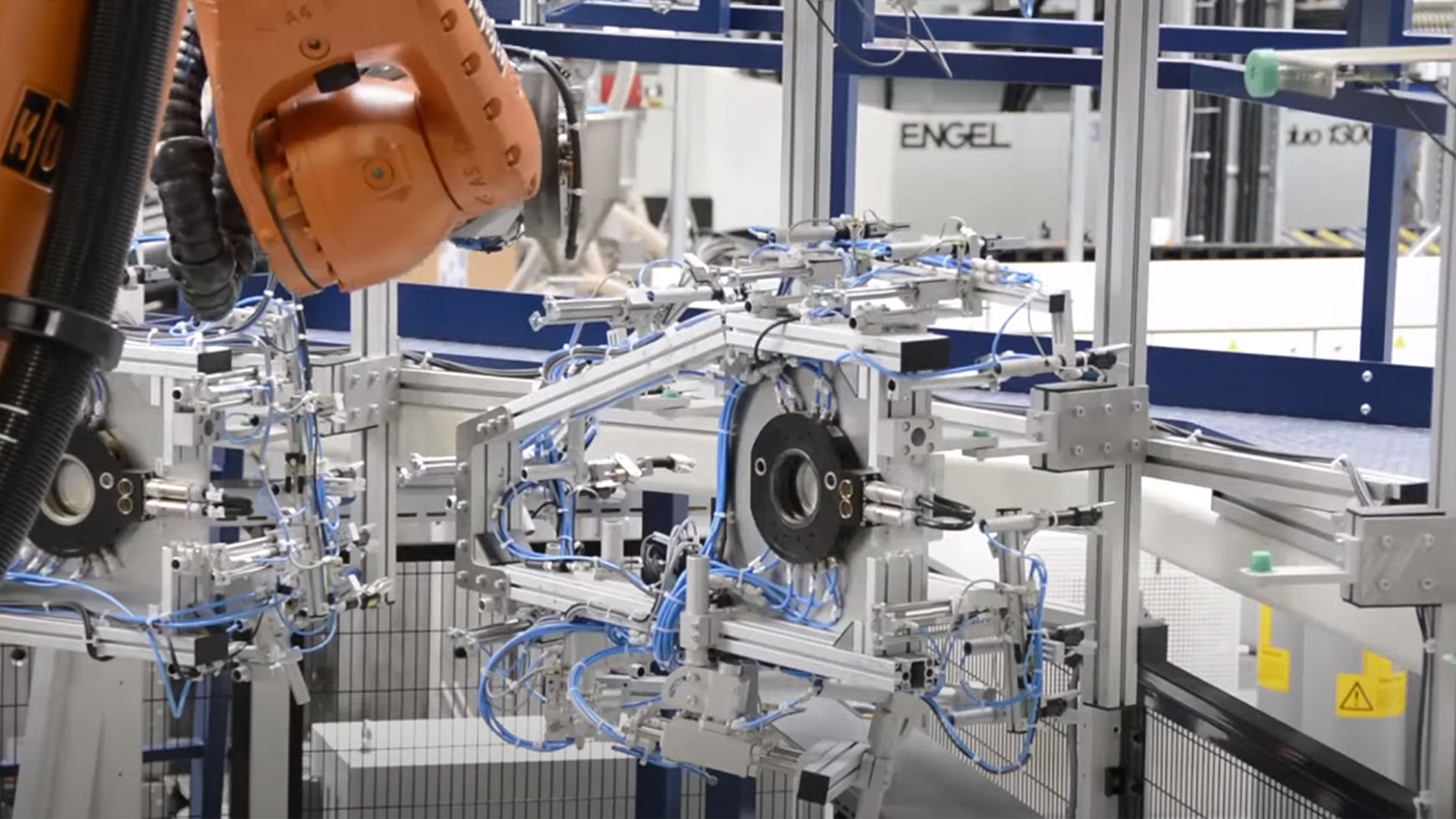
OUTILS END-OF-ARM
Depuis plus de 30 ans, Zimmer Group propose des systèmes d’outillage end-of-arm, par exemple pour le montage de chaînes d’entraînement, le chargement de lignes de production dans l’industrie automobile ou le traitement de pièces constituant les caissons dans l’industrie du mobilier.
Accéder aux EOAT
Changeur de palettes
Série SPP

- Force d'insertion et de maintien maximale
- Conception fine pour une exploitation maximale de la salle de machines
- Détecteur de l'état de serrage et de la présence de palettes
- Manipulation sûre grâce à la fonction de nettoyage et à l'accumulateur à ressort

- Force d'insertion et de maintien maximale
- Conception fine pour une exploitation maximale de la salle de machines
- Détecteur de l'état de serrage et de la présence de palettes
- Manipulation sûre grâce à la fonction de nettoyage et à l'accumulateur à ressort

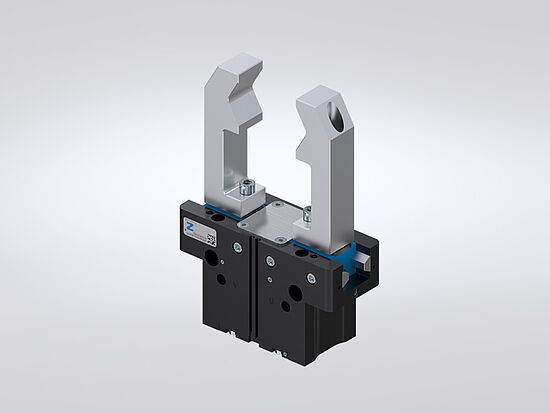
Pinces parallèles deux mors
Série GP400

- Grande force de préhension par un transfert optimal de la force d´entrainement en force de préhension

- Grande force de préhension par un transfert optimal de la force d´entrainement en force de préhension
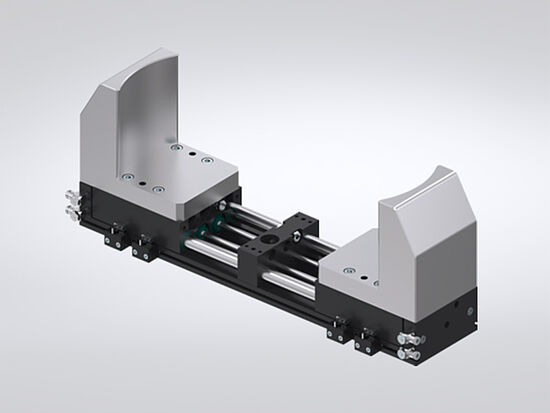
Pince parallèles deux mors grande course
Série GH7000

- Guidage linéaire fortes charges idéale pour l'utilisation dans des conditions extrêmes
- Idéale pour l'absorption de forces transversales et de couples maximale

- Guidage linéaire fortes charges idéale pour l'utilisation dans des conditions extrêmes
- Idéale pour l'absorption de forces transversales et de couples maximale
Changeurs d‘outils
Série WWR1000

- Changeur pour charge lourde pouvant encaisser des couples jusqu'à 12000 Nm
- Poids recommandé jusqu´à 1000 kg
Pinces parallèles deux mors
Série GP400
- Grande force de préhension par un transfert optimal de la force d´entrainement en force de préhension

- Changeur pour charge lourde pouvant encaisser des couples jusqu'à 12000 Nm
- Poids recommandé jusqu´à 1000 kg
- Grande force de préhension par un transfert optimal de la force d´entrainement en force de préhension