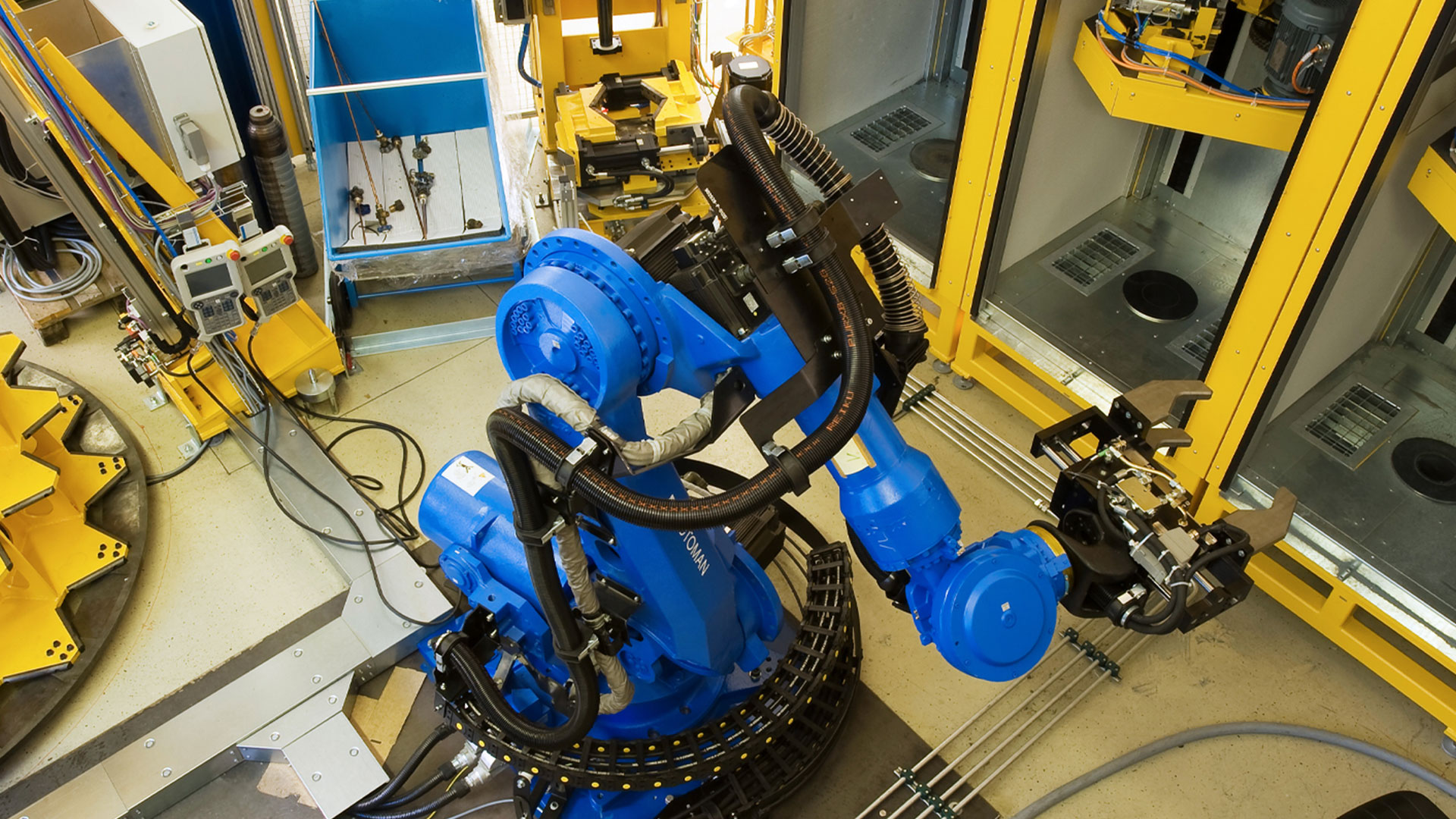
기존의 산업용 로봇
로봇 기반 자동화의 성공 신화는 1960년대 초 종래의 산업용 로봇 분야에서 시작되었습니다. 그 이후로 기술은 빠르게 발전했습니다. 로봇은 설치, 프로그래밍 및 정비에 있어 더 안정적이고 유연하며 쉬워졌습니다. Zimmer Group은 1980년에 세계 최초의 양산 그리퍼를 출시했으며, 그 이후로 End-of-Arm Tools(EOAT) 부문의 기준을 세웠습니다.
상담이 필요하시거나 구체적인 로봇 사용에 대한 질문이 있으십니까? 그렇다면 Zimmer에 문의해주십시오!
이점:
- 기존 설비에 간단하게 통합 가능
- 최대의 성능과 최고의 안전성
- 전체 가치 사슬을 위한 시스템 구성
- 모든 환경 조건을 위한 IP 보호 등급
- 제조 및 사용 시 에너지 효율성
로봇 암의 구성 레벨
로봇 플랜지
후속 공구를 기계적으로 연결하는 용도. 로봇 플랜지에 장착된 구성 부품은 로봇 유형에 따라 내부 또는 외부에서 에너지를 공급받습니다. 이와 관련하여 제어 신호뿐만 아니라 공압식, 전기식, 유압식 매체도 전달할 수 있습니다.
로봇 플랜지 어댑터 플레이트
특수 로봇 플랜지와 ISO 부분 마운팅 서클 사이 어댑터 플레이트.
다기능 레벨
교환, 보정, 보호 및 실행을 위한 ISO 부분 마운팅 서클이 있는 다기능 구성 부품. 이외에도 신호 및 매체 전송용 에너지 엘리먼트를 툴체인저용으로 구입할 수 있습니다. 이 레벨의 구성 부품에는 회전 분배기, 축 보정 모듈, 충돌 방지, 앵글 플랜지, 툴체인저 및 에너지 엘리먼트 등이 있습니다.
 더 읽어보기
더 읽어보기다기능 레벨 어댑터 플레이트
ISO 부분 마운팅 서클과 자동화 구성 부품 사이 어댑터 플레이트.
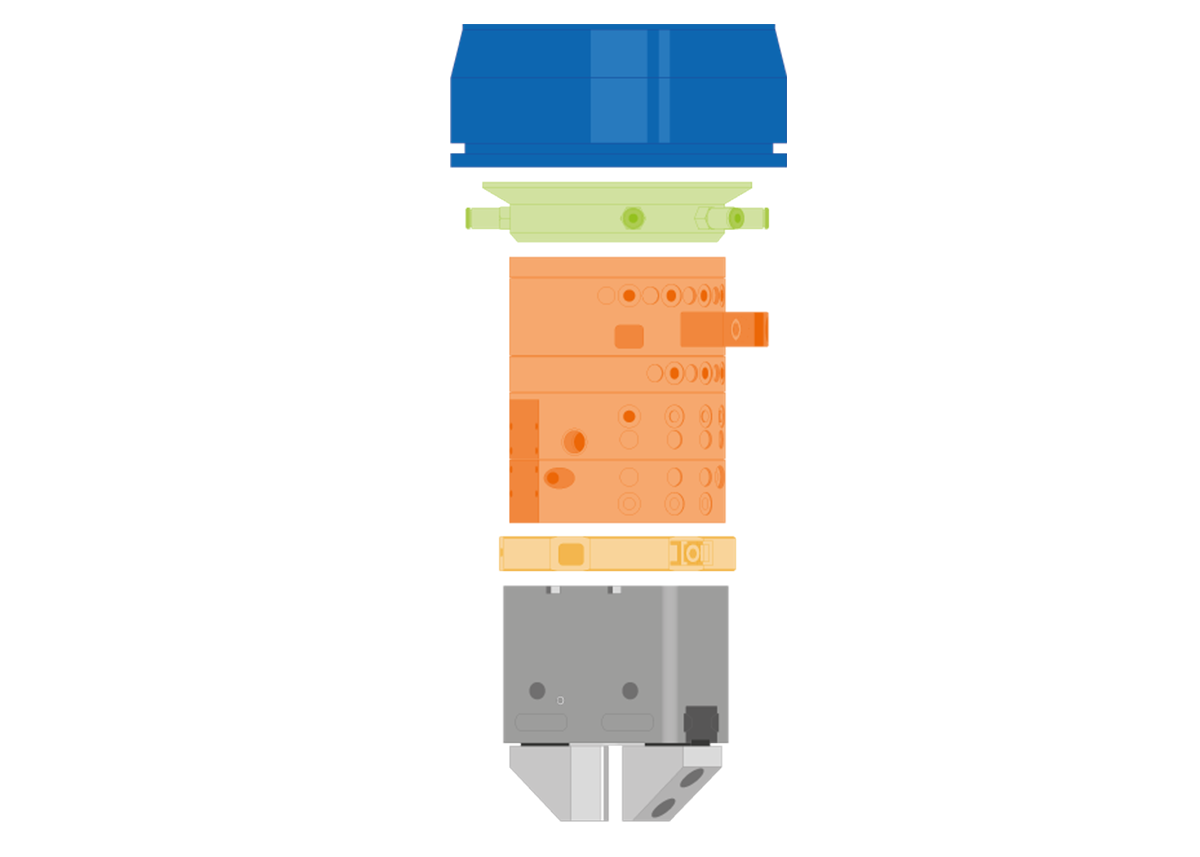
엔드 이펙터
1. 로봇 플랜지
후속 공구를 기계적으로 연결하는 용도. 로봇 플랜지에 장착된 구성 부품은 로봇 유형에 따라 내부 또는 외부에서 에너지를 공급받습니다. 이와 관련하여 제어 신호뿐만 아니라 공압식, 전기식, 유압식 매체도 전달할 수 있습니다.
2. 로봇 플랜지 어댑터 플레이트
특수 로봇 플랜지와 ISO 부분 마운팅 서클 사이 어댑터 플레이트.
3. 다기능 레벨
교환, 보정, 보호 및 실행을 위한 ISO 부분 마운팅 서클이 있는 다기능 구성 부품. 이외에도 신호 및 매체 전송용 에너지 엘리먼트를 툴체인저용으로 구입할 수 있습니다. 이 레벨의 구성 부품에는 회전 분배기, 축 보정 모듈, 충돌 방지, 앵글 플랜지, 툴체인저 및 에너지 엘리먼트 등이 있습니다.
 더 읽어보기
더 읽어보기4. 다기능 레벨 어댑터 플레이트
ISO 부분 마운팅 서클과 자동화 구성 부품 사이 어댑터 플레이트.


산업 로봇용 구성 부품
3,000개 이상의 표준 그리퍼, 스위블 장치, 로봇 및 그 외 다양한 제품들을 선보이고 있습니다. 고급 기술과 뛰어난 제품을 종류별로 갖추었으며, 뛰어난 납품 및 공급력을 보장합니다.
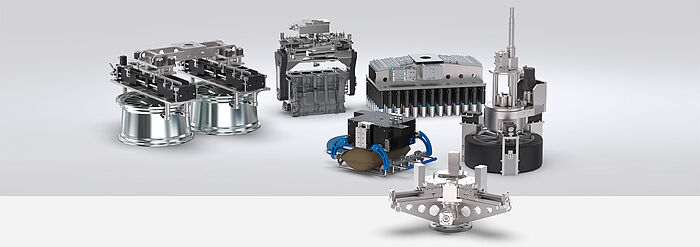
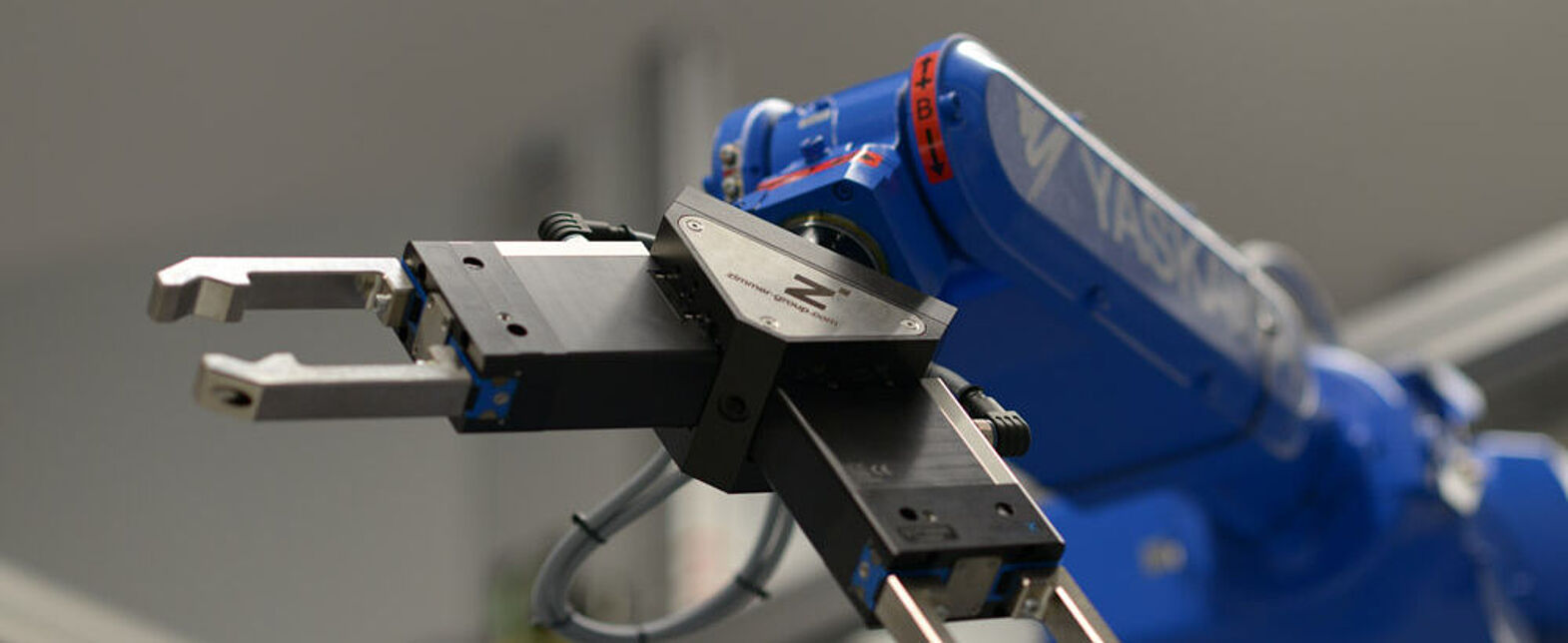
END-OF-ARM 툴
Zimmer Group은 자동차 산업의 생산 라인 적재와 파워 트레인 장치의 조립 또는 가구 산업의 가구 몸체 가공 등을 위한 End-of-Arm-Tooling 시스템을 지난 30년간 제공해왔습니다.
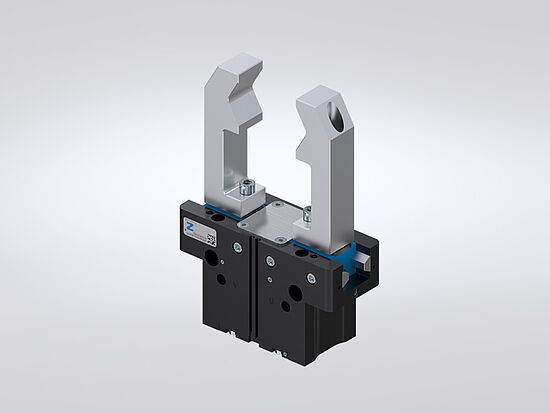
큰 스트로크를 갖는 2조 평행 그리퍼
시리즈 GH7000


공구교환기
시리즈 WWR1000

2조 평행 그리퍼
시리즈 GP400




2조 평행 그리퍼
시리즈 GP400
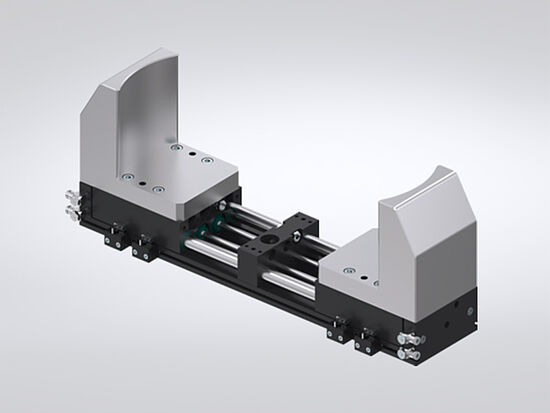
팔레트 체인저
시리즈 SPP

- 최고의 클램핑 및 유지력
- 기계 공간을 최대로 활용하기 위한 슬림한 구조
- 클램핑 상태 및 팔레트 유무에 대한 감지 센서
- 세척 기능 및 스프링 어큐뮬레이터를 통한 안정된 핸들링
1. 팔레트 체인저

- 최고의 클램핑 및 유지력
- 기계 공간을 최대로 활용하기 위한 슬림한 구조
- 클램핑 상태 및 팔레트 유무에 대한 감지 센서
- 세척 기능 및 스프링 어큐뮬레이터를 통한 안정된 핸들링